9.6. Smoothing data¶
Smoothing data is usually a bad idea. The best way to improve noisy data is to rethink your samle preparation or measurement procedure whenever possible. The second best way is to measure more of it and rely upon the central limit theorem to work its magic. Smoothing is usually little more than an aesthetic fix and it introduces distortions to your data that become serious sources of systematic uncertainty in any later attempts to interpet the smoothed data.
The default smoothing algorithm is a boxcar average, implemented as a generic linear filter using a flat, symetric kernel. The width in data points of this kernel is the specified parameter. An odd kernel size is enforced. If you set the size parameter to, say, 12, a value of 13 will be used.
There is an option for a Gaussian filter, which is also implemented as a generic linear filter. In this case, you must specify both the kernel size and the σof the Gaussian.
The final smoothing option is IFEFFIT's three-point smoothing algorithm repeatedly to your data. The number of repetitions is set using the number selection control used to set the kernel size of the other two options..
A Savitsky-Golay filter. is available when using LARCH, but not with IFEFFIT.
You can overplot the data and the smoothed data using the Plot data and smoothed. The Make smoothed group button makes a group out of the smoothed data and places it in the group list.
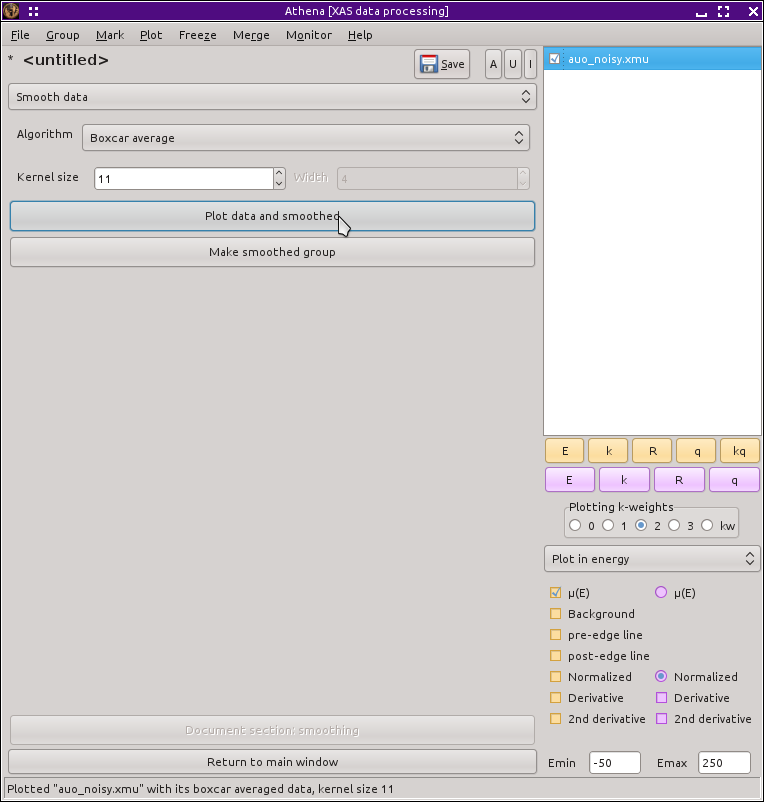
Fig. 9.19 The smoothing tool.
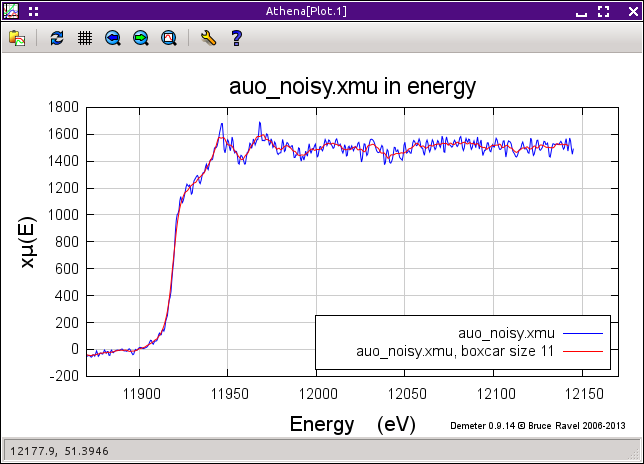
Fig. 9.20 Some noisy gold oxide data that has been smoothed using the boxcar average.
DEMETER is copyright © 2009-2016 Bruce Ravel – This document is copyright © 2016 Bruce Ravel
This document is licensed under The Creative Commons Attribution-ShareAlike License.
If DEMETER and this document are useful to you, please consider supporting The Creative Commons.